Разработчики Калифорнийского университета (США) и Сеульского университета (Южная Корея) создали новые механизмы для робота-таракана, позволяющего устройству запрыгивать на высокие преграды. Изобретение было представлено на Международном форуме по автоматизации и робототехнике ICRA 2016, которая прошла на прошлой неделе в Стокгольме (Швеция).
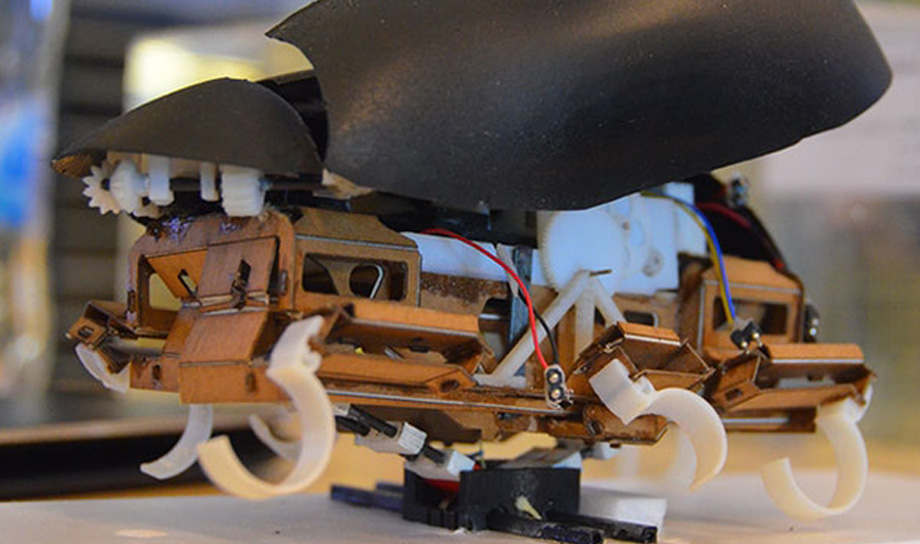
Робот, которого назвали JumpRoACH, доработанный крыльями и катапультой для прыжков, является версией шестиногого VelociRoACH. Новые механизмы помогают роботу-таракану, после падения на спину или на бок, вернуться в горизонтальное положение. Робот, имеющий вес в 60 г, при помощи специального механизма из углепластиковых трубок и латексных резинок может подпрыгнуть на высоту до 1,6 метра.
VelociRoACH, послуживший основой для нового робота JumpRoACH, — быстрый, маневренный и относительно дешёвый шестиногий робот. В Калифорнийском университете разработчики проводят над ним разные эксперименты. Так ранее экспериментаторы уже устанавливали новый панцирь на VelociRoACH, чтобы робот-таракан мог свободно протискиваться сквозь щели. Помимо этого, исследователям удалось разогнать X2-VelociRoACH до рекордной скорости в 4,9 м/секунду, а так же запустить ввысь с помощью него другого робота.