Группа учёных Вашингтонского университета (UW) сконструировала роботизированную руку, способную не только выполнять разнообразные манипуляции, но и самообучаться, используя собственный опыт.
Учёные потратили на свою разработку немало лет. Как считает ведущий инженер проекта Vikash Kumar, манипуляция рук – это одна из самых сложных задач, которые приходится решать инженерам-робототехникам.
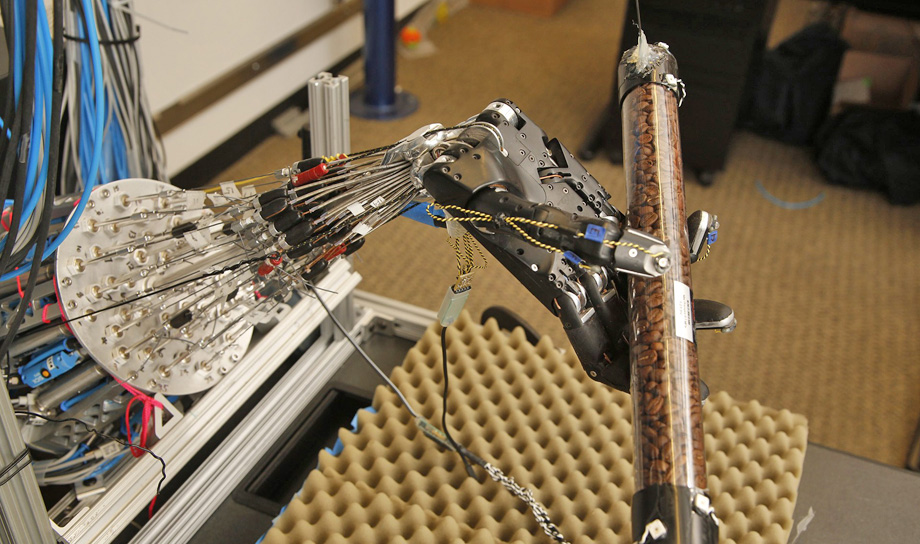
Учёные разработали точную моделировку, которая позволила операционной системе проводить анализ движения руки в реальном времени. В последней демонстрации, роботизированная рука манипулирует палкой с округлыми концами.
Можно наблюдать, как рука с каждым разом становилась более «уверенной» при вращении предмета. Всё это происходило благодаря алгоритму машинного обучения, который «помогал и подсказывал» роботизированному устройству действия, необходимые для достижения заданного результата.
Технология автономного подхода к обучению, разработанная учёными UW, прогрессивнее, чем технологии, которые позволяют программировать только отдельные движения роботизированной руки.
Старший автор исследований Emo Todorov утверждает, что используемая ими универсальная технология, позволяет роботизированной руке учиться собственно на своих движениях и не требует специальных настроек от исследователей.
Ловкая рука из UW стоит 300 тыс. долларов. Для её создания использован скелет Shadow Hand, привод с системой пользовательской пневматики. Она способна двигаться даже быстрее, чем рука человека.
При выполнении различных задач, интеллектуальная система устройства собирает все данные, поступающие от камер и датчиков, и, используя алгоритм машинного обучения, постоянно разрабатывает и совершенствует всевозможные модели движений.
Пока командой исследователей достигнут и показан результат одного типа манипулирования. Далее учёные планируют изучать то, как роботизированная рука будет пытаться понять незнакомые объекты и манипулировать ими, а так же работать в новых условиях, с которыми прежде не сталкивалась.